

Please Leave Us A Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
2024-04-15
La interfaz de bus de bus de codificador de eje fotoeléctrico absoluto
1 Introducción El codificador de ángulo de eje fotoeléctrico absoluto es un dispositivo de medición de ángulo digital que mide la posición angular y la velocidad angular del eje giratorio en tiempo real. Convierte la información del ángulo del eje en códigos digitales en forma de grados, minutos y segundos, y la conexión del bus puede realizar medidas en tiempo real. Tiene las ventajas de una alta confiabilidad de trabajo, una fuerte capacidad anti-interferencia, alta precisión, memoria de alimentación, etc. Se utiliza ampliamente en sistemas de seguimiento y posicionamiento de medición digital, como equipos de gama de disparos, teodolito digital, radar y algunos grandes equipos militares.
En estos sistemas prácticos de control de aplicaciones, debido a las diferentes estructuras de datos de los sensores y detectores de cada subsistema, el codificador de eje fotoeléctrico absoluto utilizará diferentes métodos de comunicación de datos internos, principalmente que incluye RS232, puertos seriales RS485 / 488, puertos paralelos, etc. . Sin embargo, en aplicaciones de ingeniería específicas, los métodos de comunicación anteriores a menudo están limitados por la distancia de transmisión y la tasa de comunicación. En los últimos años, la comunicación en serie se ha desarrollado rápidamente, y han surgido una variedad de formularios de bus de campo del sistema de control. El bus de lata es uno de los más utilizados. Es la abreviatura del autobús de red de área local del controlador y es un soporte efectivo para el control distribuido y el control en tiempo real. Red de comunicación en serie. Debido al alto rendimiento, la alta fiabilidad y el diseño único del autobús CAN, se ha convertido en el autobús de campo más popular y en tiempo real en casa y en el extranjero. El desarrollo y los cambios de los métodos de comunicación interna en el sistema de control hacen que el codificador utilizado para medir el desplazamiento angular y la velocidad angular proporcionen una interfaz de bus de lata para cumplir con los requisitos de diseño del bus de campo de todo el sistema de control.
2 Principio de trabajo del codificador y transmisión de datos
2.1 Principio de trabajo El codificador consta de dos partes: un dispositivo de adquisición de datos y un dispositivo de procesamiento de datos. El diagrama de bloques estructurales se muestra en 1. El microcomputador de chip único es la parte central del sistema de circuito del codificador. Después de recopilar las señales del codificador (código grueso, código fino medio, código fino), se subdivide mediante código fino, corrección del canal de código, adición digital, ajuste eléctrico cero, procesamiento de software como grado, minuto y segunda conversión, y finalmente se muestra y y finalmente se muestran y y y se muestran y y y se muestran y y y se muestran y y se muestran y y y se muestran y y se muestran y y y se muestran y y se muestran y y y se muestran y y y se muestran. Realice la interfaz con el sistema de control.
2.2 Transmisión de datos La transmisión de datos entre el codificador y el sistema de control se puede usar tanto en modos paralelos como en serie. La transmisión paralela transmite datos a través del puerto paralelo. Cada datos requiere un núcleo del cable de datos. Por ejemplo, se requiere un cable de 24 núcleos para un codificador de 24 bits. Por lo tanto, el espacio de uso es limitado y solo es adecuado para la transmisión de corta distancia y requisitos especiales. ocasión. En la transmisión en serie, la información de datos se transmite en serie a través de un par retorcido, y se agregan bits adicionales de acuerdo con diferentes protocolos de comunicación para implementar funciones como la corrección de errores. Esta función se puede extender a los sistemas de bus de datos. La transmisión en serie tiene menos cables, menos hardware, bajo costo, larga distancia de transmisión y datos seguros y confiables.

2.3 El codificador propuesto puede interfaz de bus en la comparación integral de varios buses de campo, el sistema de comunicación basado en el bus CAN tiene muchas características excelentes: la señal de datos se transmite por voltaje diferencial; El medio de transmisión del bus puede usar par retorcido, cable coaxial y fibra óptica; puede funcionar en modo multimaster, modo de comunicación flexible; puede transmitir y recibir datos en el modo de transmisión punto a punto, punto a multipunto y global; La información del nodo en la red se puede dividir en diferentes prioridades para cumplir con diferentes requisitos en tiempo real; Tecnología de arbitraje de autobuses no destructivos; Los datos adoptan una estructura de trama corta, cada cuadro es de 8 byte y la tasa de error de datos es baja; El subcapitán MAC de la capa de enlace de datos en el protocolo de comunicación tiene capacidades estrictas de detección de errores; Tiene estándares internacionales y buena apertura. Por lo tanto, en la transformación del modo de comunicación interna del sistema de seguimiento fotoeléctrico, el bus CAN se usa como la estructura del bus de comunicación de datos, y luego se propone la interfaz de bus CAN del codificador.
3 Aplicación de la interfaz de bus de codificadores en el sistema de seguimiento fotoeléctrico
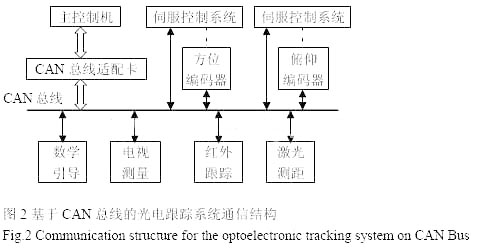
3.1 El codificador se utiliza para la detección de posición del sistema de seguimiento fotoeléctrico. El codificador de eje fotoeléctrico absoluto es un sensor para medir el acimut y el ángulo de tono del sistema de seguimiento fotoeléctrico en el sistema de seguimiento fotoeléctrico. La estructura interna del bus del sistema de seguimiento fotoeléctrico se transforma en el método de comunicación de bus de lata. La interfaz Can Bus tiene las características de la interfaz flexible y el ahorro de línea. Al mismo tiempo, tiene un microprocesador y puede usarse como un nodo inteligente en el sistema para enviar marcos remotos directamente a otros dispositivos para lograr un control inteligente. La Figura 2 es un diagrama de estructura de comunicación del sistema de seguimiento fotoeléctrico basado en el bus CAN. El sistema de seguimiento fotoeléctrico utiliza una sola estructura de bus en serie del bus de lata en lugar de la estructura paralela de múltiples métodos de comunicación. El acimut y los ángulos de tono medidos por los dos codificadores fotoeléctricos se envían a la máquina de control principal a través del bus, y la máquina de control principal procesa los datos en consecuencia. A través del sistema de control de servomotor de control de bus, todos los subsistemas se pueden conectar juntos mediante un par de pares retorcidos, que simplifica el cableado del sistema, mejora la utilización general del bus del sistema, la transmisión de datos en tiempo real y la escalabilidad del sistema, y el error de bits, y el error de bits La tasa se reduce enormemente.
3.2 El nodo codificador puede la composición de hardware de la interfaz de la interfaz de bus
La interfaz CAN Bus está compuesta principalmente de microcomputador de chips único, controlador de bus de bus, controlador de bus de bus y hardware de aislamiento fotoeléctrico. El circuito específico de la interfaz de comunicación del bus CAN se muestra en la Figura 3.
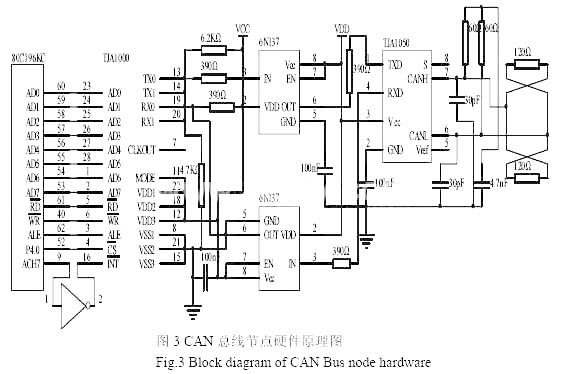
La computadora de un solo chip selecciona Intel80C196KC, que es un microcontrolador integrado de 16 bits, que es más adecuado para ocasiones complejas de control en tiempo real. También es responsable del procesamiento de datos del codificador y la inicialización del nodo de bus CAN. El controlador CAN selecciona el SJA1000 de Philips Semiconductor para realizar la interfaz de comunicación de datos entre el bus y la computadora host (computadora de control), admite los protocolos CAN2.0a y Can2.0b, tiene un búfer de recepción de 64 bytes extendido y admite el primero en el primero en primera entrada. -out (FIFO) Principio, Apoya los códigos de identificación de 11 bits y 29 bits, la velocidad de bits de comunicación hasta 1 Mbps, puede funcionar en modo Basiccan y en modo pelícano. El controlador de bus CAN elige a Philips TJA1050, que es un controlador de bus CAN de alta velocidad, que proporciona la interfaz entre el controlador CAN y el bus físico, se da cuenta de las funciones de transmisión y recepción diferencial del bus CAN, y tiene un amplio rango de modo común Bajo una fuerte capacidad de recepción diferencial de interferencia electromagnética, el nivel de entrada es compatible con dispositivos de 3.3V, y los nodos sin potencia no interferirán con el bus. Unirse a TJA1050 puede garantizar la comunicación de datos de alta velocidad. Para la seguridad y la capacidad anti-Jamming mejorada, el uso de las características de rendimiento simétricas de TJA1050, use terminales separados. Dos pequeños condensadores de 30pf están conectados en paralelo entre el Canh y Canl y la tierra, lo que puede filtrar la interferencia de alta frecuencia en el bus y una cierta capacidad para evitar la radiación electromagnética. Para mejorar aún más la capacidad anti-interferencia del sistema, se utiliza un optocopler de alta velocidad 6N137 entre el controlador CAN SJA1000 y el controlador CAN TJA1050 para formar un circuito de aislamiento para lograr el aislamiento galvánico. El VCC y VDD de la fuente de alimentación en ambos lados del 6N137 están completamente aislados, lo que puede evitar el circuito al mismo tiempo, se deben conectar dos resistencias coincidentes de impedancia de autobuses de 120Ω en ambos extremos del bus.
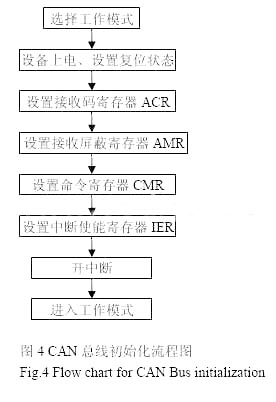
3.3 Diseño del software de nodo La información del ángulo (grados, minutos y segundos) del codificador de eje fotoeléctrico absoluto se envía desde el controlador de lata al bus de lata o desde el bus de lata al búfer de lata automáticamente por el controlador de bus SJA1000. Su programa de comunicación de la interfaz de bus CAN está compuesto por un subprograma de inicialización, enviando subprograma y recibiendo subprograma. Primero seleccione el modo de trabajo de bus CAN de acuerdo con las necesidades reales del sistema. Aquí, seleccione el modo Pelican, oscilador de cristal de 12MHz, la velocidad de transmisión de datos del bus se establece en 500kbits / s, cada nodo de bus debe establecer la misma velocidad de transmisión de datos para garantizar la comunicación normal. Determine que la conexión física entre SJA1000 y el MCU es confiable, y luego inicialice el controlador SJA1000. En el modo de reinicio SJA1000, establezca el estado inicial de cada registro. El diagrama de flujo de inicialización se muestra en la Figura 4. La transmisión y la recepción de datos se realizan mediante la subrutina de envío y la subrutina receptora. El ID de mensaje determina el flujo de datos de nodo. Al enviar datos, el principio de configuración del segmento de bits de recepción de identificación de mensaje es: la identificación correspondiente del nodo que debe recibir el bit es 0 y los bits restantes son 1. Al recibir datos, es lo contrario. Se juzga por ID si es información enviada a sí misma. Se recibe, no se filtra.
4. Conclusión
Como un autobús de comunicación a nivel de campo, el bus de la lata tiene una alta fiabilidad y rendimiento de costos. El codificador de eje fotoeléctrico absoluto con la interfaz de bus CAN lo hace más flexible para su uso en los sistemas de control.
Este artículo es innovador: la interfaz CAN Bus del codificador y su aplicación en el sistema de seguimiento fotoeléctrico
Compartir:
Realizar consulta
Ms. carol Dong
Número de Teléfono:86-431-85543703
Fax:86-431---88634119
Móvil:+8613894866263
Email:sales@encoders.com.cn
Dirección:333Feiyue Donglu, Changchun City, Jilin Province. China, Changchun, Jilin
Sitio movil
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.